本文内容为正弦波的采样, 加窗, 傅里叶变换和梅尔滤波, 将波形定为简单的正弦波是为了简化例子, 专注于每个变换所带来的数值上的变化, 以更好的理解整个过程, 为音频处理做铺垫.
注意: 文中FFT 部分只是列出了傅里叶变换的输出, 并没有解释为什么是这样的输出, 比如用torch.fft.fft()得到的是复数, 需要求模长, 并除以样本的一半, 才是正确的幅值等.这些都涉及到傅里叶变换的原理, 本系列文章暂时不涉及, 插个眼 在这里, 万一以后有契机补充这部分内容也说不定.
所有代码的import 1 2 3 4 import torchimport torchaudioimport matplotlib.pyplot as pltimport numpy as np
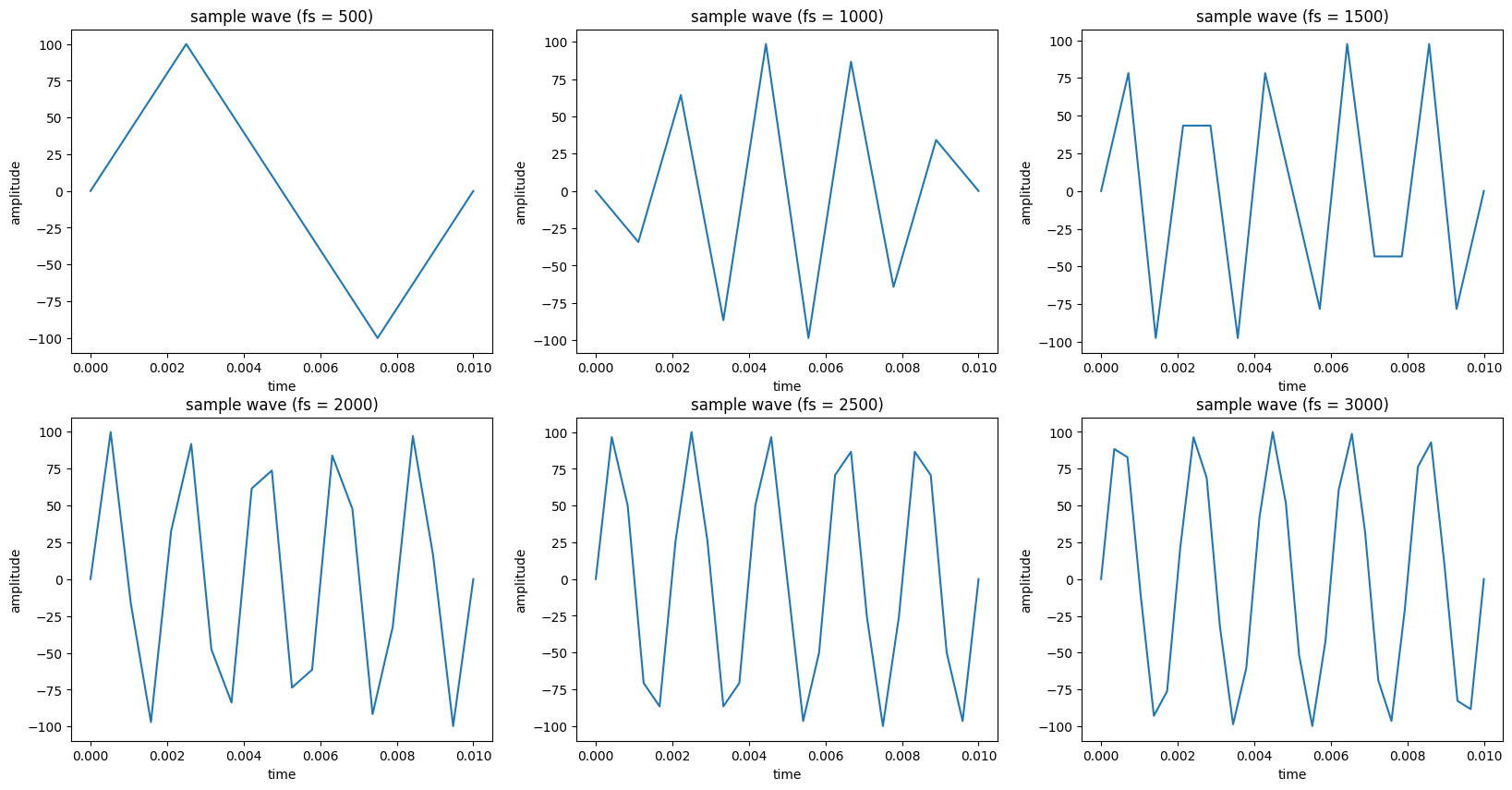
采样 对频率为500 Hz 幅值为100 的正弦波进行5 个周期的采样, 分别设置采样率为1-6 倍原频率.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 f1 = 500 T = 1 / f1 TT = 5 *T fig, axes = plt.subplots(2 , 3 , figsize=(20 , 10 )) for i, ax in enumerate (axes.flatten()): fs = f1 * (i + 1 ) N = int (fs * TT) print (f"f1 = {f1} , T = {T} , TT = {TT} , fs = {fs} , N = {N} " ) x = torch.linspace(0 , TT, N) y = 100 * torch.sin( (2 *torch.pi)*f1*x) ax.plot(x, y) ax.set_xlabel("time" ) ax.set_ylabel("amplitude" ) ax.set_title(f"sample wave (fs = {fs} )" )
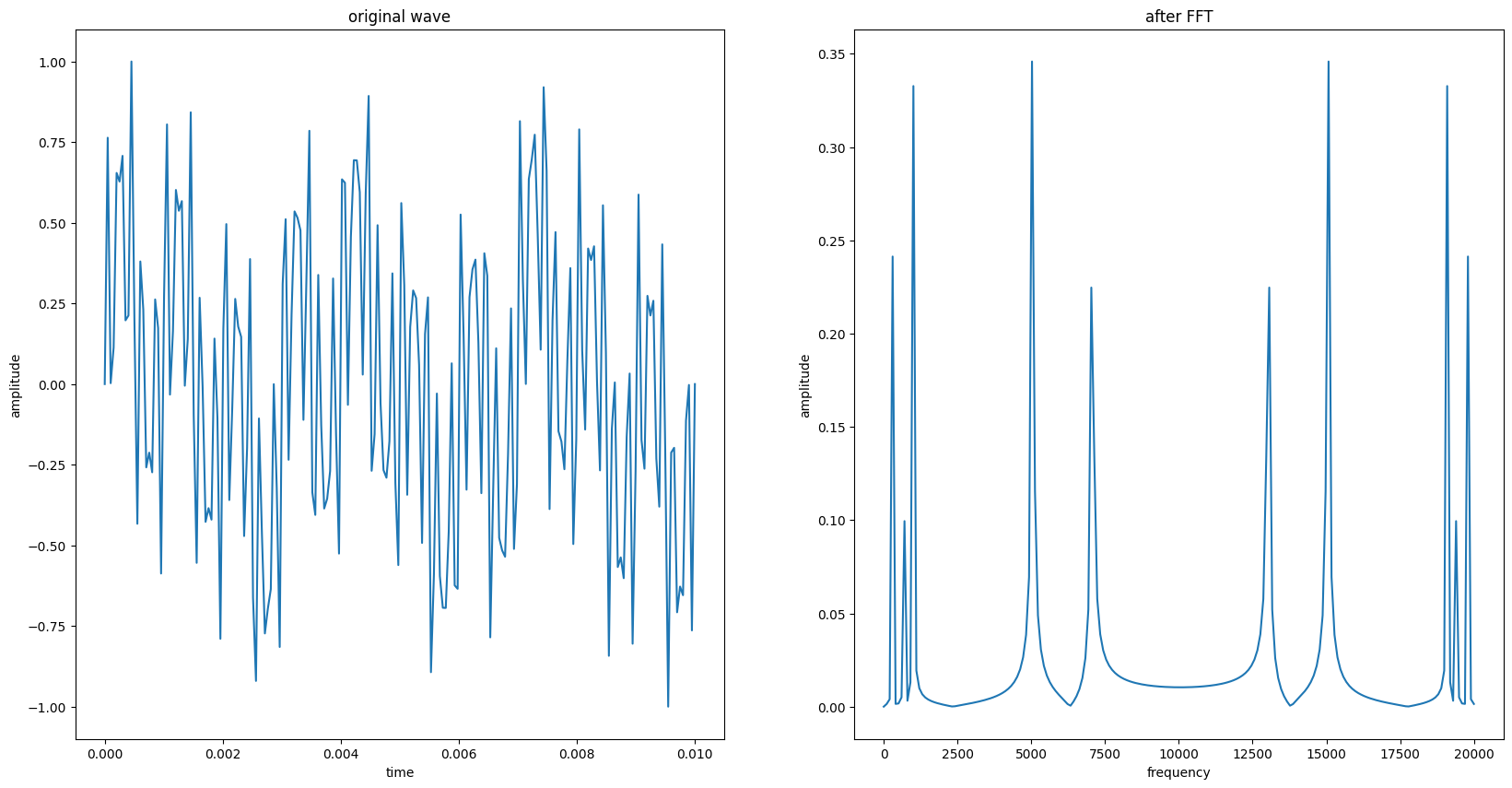
FFT 为了展示出FFT 的作用, 这里用了5 个不同频率和幅值的正弦波以及一个随机噪声, 采样率设定的比较高, 让波形看起来比较丝滑.后续处理都是基于这个波形, 前面采样部分只是起到一个演示作用.
下面直接画出FFT 前后的波形.需要注意的是, 在FFT 前我先把波形都归一化到了[-1, 1].至于为什么可能要看完本篇文章才能看得懂: 对于单个音频来说, 同个语句由于响度不一样大, 波形幅值会不一样, 但大致形状相同.到文章的最后输入模型的分贝值就会产生偏移, 这会给模型带来数值大小的困扰, 如果归一化就不会有这个问题.对于不同的语句音频, 归一化就是去除响度的干扰因素, 默认所有语句, 都一个响度.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 f1 = 1000 T = 1 / f1 TT = 10 *T fs = 20000 N = int (fs * TT) f2 = 300 f3 = 700 f4 = 7000 f5 = 5000 x = torch.linspace(0 , TT, N) y1 = 70 * torch.sin( (2 *torch.pi)*f1*x) y2 = 50 * torch.sin( (2 *torch.pi)*f2*x) y3 = 20 * torch.sin( (2 *torch.pi)*f3*x) y4 = 60 * torch.sin( (2 *torch.pi)*f4*x) y5 = 80 * torch.sin( (2 *torch.pi)*f5*x) noise = torch.randn(N) * 100 y = y1 + y2 + y3 + y4 + y5 + noise y = y1 + y2 + y3 + y4 + y5 max_val = torch.max (torch.abs (y)) if max_val > 0 : y = y / max_val print (f"max_val: {max_val} " )fig, axes = plt.subplots(1 , 2 , figsize=(20 , 10 )) axes = [axes] axes[0 ][0 ].plot(x, y) axes[0 ][0 ].set_xlabel("time" ) axes[0 ][0 ].set_ylabel("amplitude" ) axes[0 ][0 ].set_title("original wave" ) y_fft = torch.fft.fft(y) y_fft = torch.abs (y_fft) / (N / 2 ) x_fft = torch.linspace(0 , fs, N) axes[0 ][1 ].plot(x_fft, y_fft) axes[0 ][1 ].set_xlabel("frequency" ) axes[0 ][1 ].set_ylabel("amplitude" ) axes[0 ][1 ].set_title("after FFT" )
注意torch.fft.fft() 计算得到的是复数, 需要勾股定理求模长, 然后要除以一半的样本数, 这样得到的幅值才是符合原本的度量.
1 2 y_fft = torch.fft.fft(y) y_fft = torch.abs (y_fft) / (N / 2 )
原始波形的横坐标是时间, 纵坐标是幅值.
但是要画出幅值图可不像画出原始采样波形那样简单, 需要你知道FFT 的输出究竟是什么.
横坐标的个数
横坐标的单位与数值
单位就是Hz, 因为其表示的是频率
数值间隔, 也就是分辨率(interval 简称 I), 为: 采样频率(fs) / (横坐标个数(N) - 1)
数值范围为0 到 采样频率(fs)
纵坐标: 与原始采样波形一样, 表示幅值大小, 只是等比缩放了
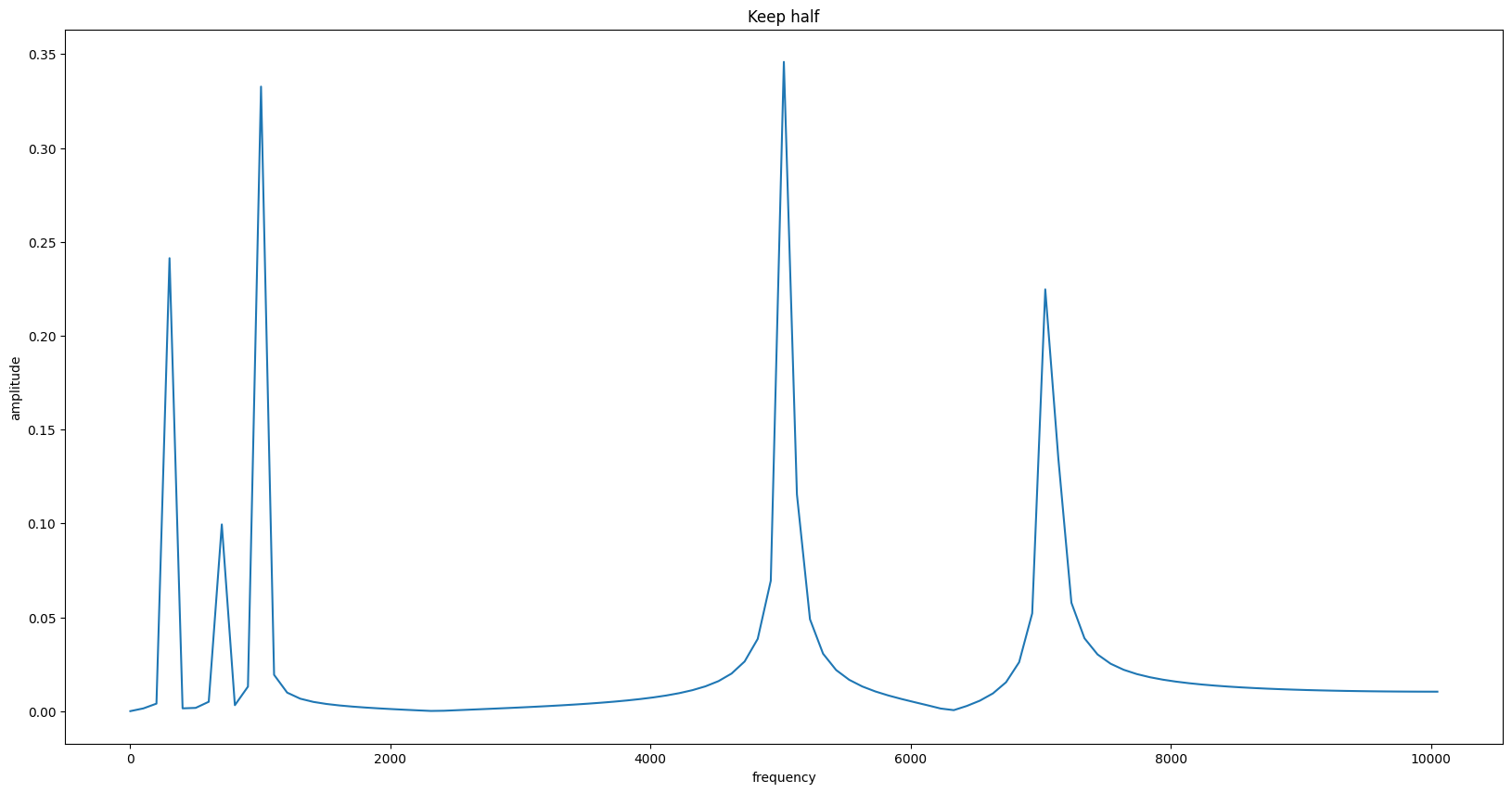
一般只取幅值图的左半边, 因为它左右对称:
横坐标的个数变为: (N // 2 + 1)
横坐标的范围变为: (0 Hz 到 (N//2*I) Hz )
1 2 3 4 5 6 7 8 9 10 interval = fs / (N-1 ) x_fft = torch.linspace(0 , (N//2 )*interval, N//2 +1 ) y_fft = y_fft[0 :N//2 +1 ] fig, axes = plt.subplots(figsize=(20 , 10 )) axes.plot(x_fft, y_fft) axes.set_xlabel("frequency" ) axes.set_ylabel("amplitude" ) axes.set_title("Keep half" )
总的来看FFT 只能分析一半采样频率以内的频率分量, 而且采样点数越多, 分析的频率分量就越多频率间隔就越小.
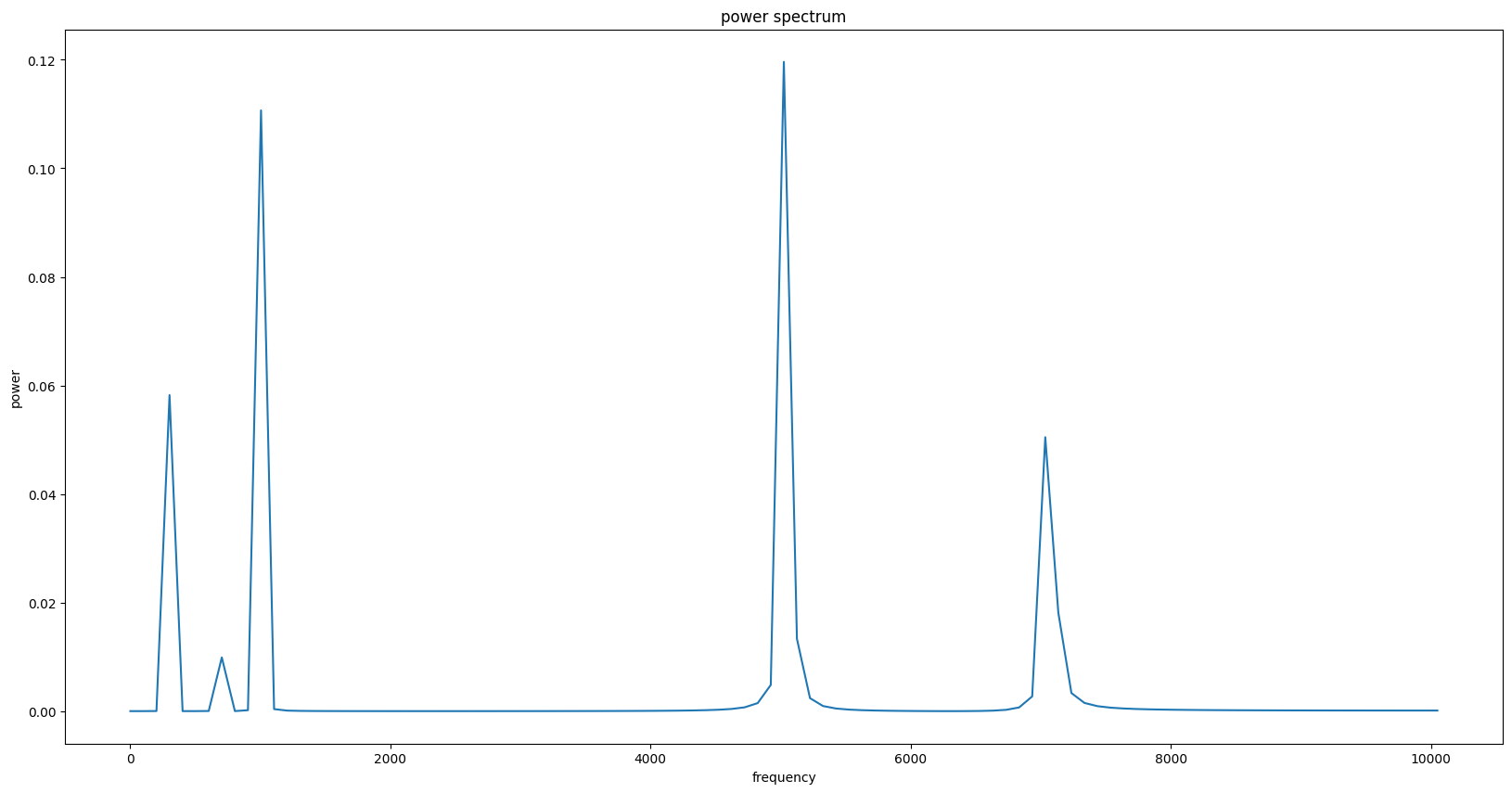
功率谱 幅值谱的纵坐标表示幅值, 对于声波来说就是声压.将幅值平方即可转化为功率.
1 2 3 4 5 6 7 8 y_pow = y_fft ** 2 fig, axes = plt.subplots(figsize=(20 , 10 )) axes.plot(x_fft, y_pow) axes.set_xlabel("frequency" ) axes.set_ylabel("power" ) axes.set_title("power spectrum" )
梅尔滤波 这一步会将功率谱转化为梅尔频谱图, 将功率转化为能量.
得到梅尔滤波器 人耳对频率的感受是非线性的, 比如你会感觉1000Hz 与2000Hz 差别巨大, 但6000Hz 与 7000Hz 差距并没有这么大.梅尔频率与普通频率基本相同, 只是单位不一样, 前者为mel 后者为Hz.将普通频率转化为梅尔频率后, 1000ml 与2000ml 和6000ml 与7000ml 在听觉上的差距就一致了.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 """ 输入: n_fft: 窗口大小 fs: 采样率 输出: x: FFT 后折半保留的单位为频率的轴 mel_fliters: (num_fliters(26), fliter_size) """ def get_mel_fliters (n_fft, fs ): def mel_to_hz (mel ): return 700 * (np.exp(mel / 1125 ) - 1 ) def hz_to_mel (hz ): return 1125 * np.log(1 + hz / 700 ) interval = fs / (n_fft-1 ) n_fft_reserve = n_fft // 2 + 1 x = torch.linspace(0 , interval*(n_fft_reserve-1 ), n_fft_reserve) hz_min = 300 hz_max = x[-1 ] mel_min = hz_to_mel(hz_min) mel_max = hz_to_mel(hz_max) mel_bins = torch.linspace(mel_min, mel_max, 28 ) hz_bins = torch.clamp(mel_to_hz(mel_bins), max =hz_max, min =hz_min) hz_indexs = [] for hz_bin in hz_bins: temp_abs = torch.abs (x - hz_bin) temp_min = temp_abs.min () indexs = torch.where(temp_abs == temp_min) hz_indexs.append(indexs[0 ].item()) hz_index_set = set (hz_indexs) if len (hz_indexs) > len (hz_index_set): print ("hz bin 有重复" ) mel_fliters = torch.zeros((26 , len (x))) for index, fliter in enumerate (mel_fliters): left = hz_indexs[index] center = hz_indexs[index + 1 ] right = hz_indexs[index + 2 ] for i in range (left, center): fliter[i] = (i - left) / (center - left) for i in range (center, right): fliter[i] = (right - i) / (right - center) return x, mel_fliters
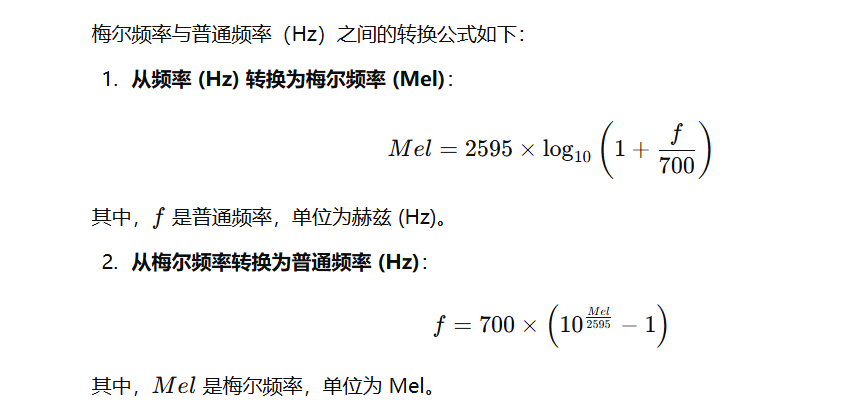
可视化滤波前后:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 fig, axes = plt.subplots(3 , 2 , figsize=(20 , 10 )) ax = axes.flatten() x, mel_fliters = get_mel_fliters(N, fs) for fliter in mel_fliters: ax[0 ].plot(x, fliter) ax[0 ].set_xlabel("Hz" ) ax[1 ].plot(y_pow) ax[1 ].set_ylim(0 , 0.15 ) ax[2 ].plot(mel_fliters[1 ]) ax[3 ].plot(mel_fliters[1 ] * y_pow) ax[3 ].set_ylim(0 , 0.15 ) ax[4 ].plot(mel_fliters[5 ]) ax[5 ].plot(mel_fliters[5 ] * y_pow) ax[5 ].set_ylim(0 , 0.15 )
左边三张图分别是
26 个梅尔滤波器叠加
第2 个滤波器
第6 个滤波器
右边
原波形
被第2 个滤波器滤波后的原波形
被第6 个滤波器滤波后的原波形
说是滤波, 其实就是直接相乘.
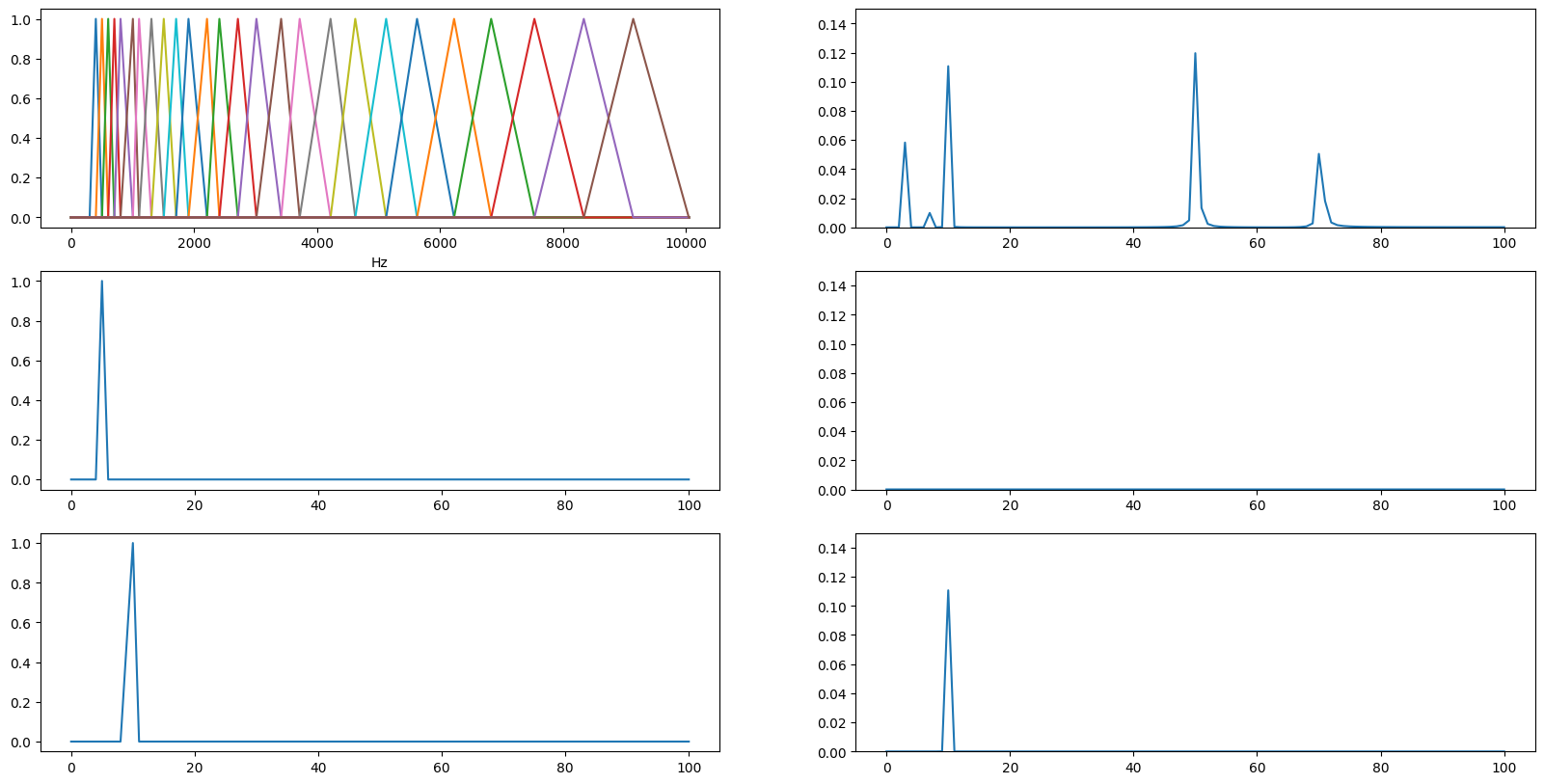
梅尔频谱图 用26 个滤波器对功率谱进行滤波会得到26 个向量, 向量中值代表的是功率, 如果将每个向量的值加起来,得到26 个值, 那么这些值代表的是什么呢, 能量.
1 2 3 4 5 6 7 8 9 10 11 12 fig, axes = plt.subplots(2 , 1 , figsize=(20 , 10 )) mel_data = [] for mel_fliter in mel_fliters: mel_data.append((mel_fliter * y_pow).sum () ) axes[0 ].plot(mel_data) mel_data = torch.tensor(mel_data) mel_data = 20 *torch.log10(mel_data + 1e-10 ) axes[1 ].plot(mel_data)
前面将hz 频率转化为mel 频率目的就让滤波的每个频率段落差值符合人耳听觉规律.这里将上图取对数得到下图也是同理.人耳对能量(响度)的感知也不是线性的, 人耳对响度(音量)的感知并不是线性的,而是更接近对数关系,即声音的主观响度随物理能量的变化呈对数增长。因此,对能量取对数可以使信号的表示更加符合人耳的听觉特性.
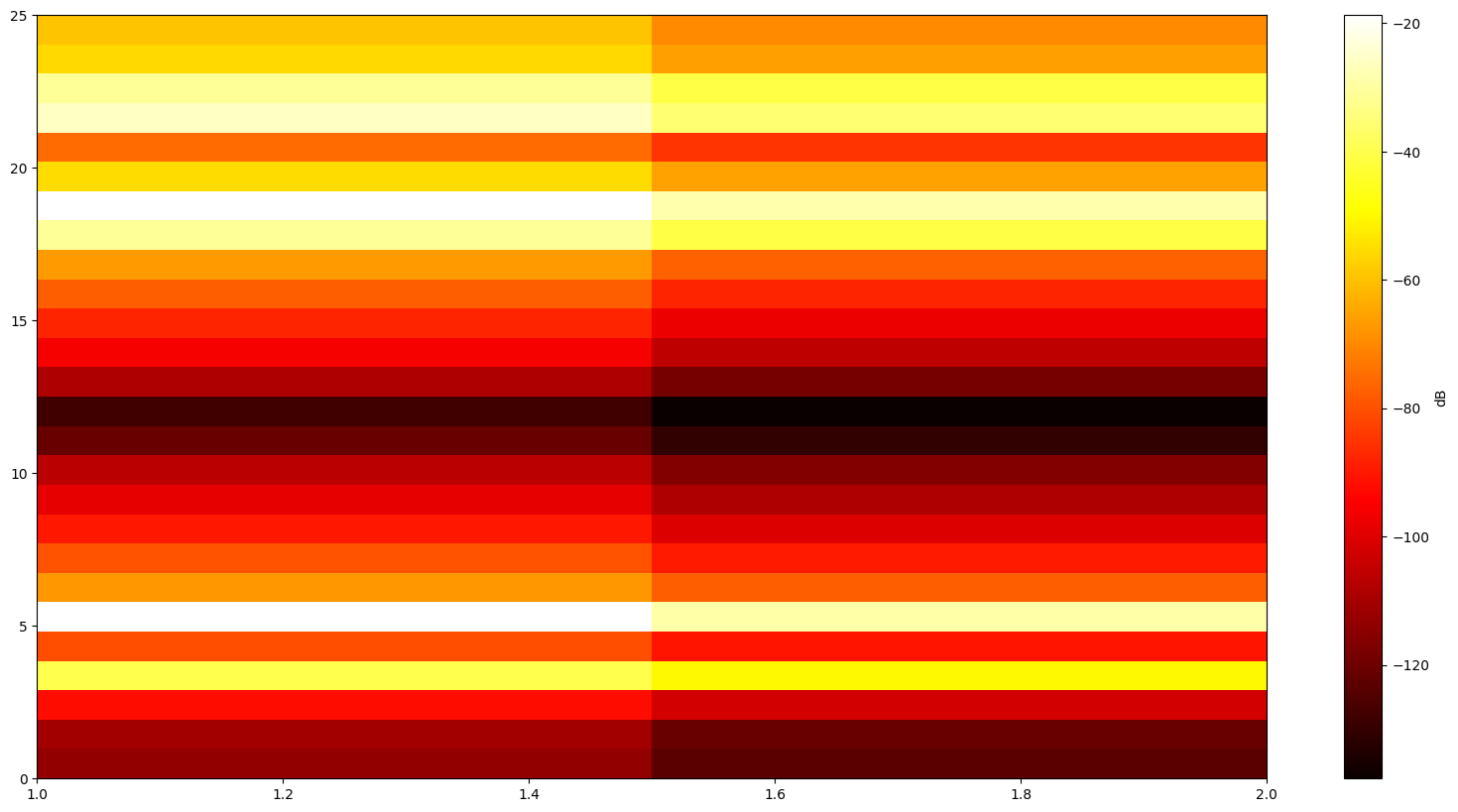
但是我们通常不单独画一段音频的梅尔频谱图, 而是将时间连续的音频分别计算梅尔频谱图, 再画到同一张图上.
1 2 3 4 5 6 fig, axes = plt.subplots(figsize=(20 , 10 )) mel_data_double = torch.stack((mel_data, mel_data-10 )) im = axes.imshow(mel_data_double.T, aspect="auto" , origin="lower" , cmap="hot" , extent=[1 , 2 , 0 , 25 ]) cbar = fig.colorbar(im, ax=axes) cbar.set_label("dB" )
** 必要内容结束 **
加窗 首先窗函数长这样, 它的横坐标长度就是FFT 前原始采样波形的长度. 加窗就是将窗函数乘上采样波形, 对采样波形进行缩放.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 f1 = 500 T = 1 / f1 TT = 5 *T fs = f1 * 10 N = int (fs * TT) x = torch.linspace(0 , TT, N) y = 100 * torch.sin( (2 *torch.pi)*f1*x) fig, axes = plt.subplots(3 , 1 , figsize=(20 , 5 )) axes[0 ].plot(y) hann_window = torch.windows.hann(len (y)) axes[1 ].plot(hann_window) axes[2 ].plot(hann_window * y)